Pneumaception VR
In the theme of our haptic explorations, we sought to make a virtual reality controller with a new form of pneumatic haptics. The controller consisted of two inflatable chambers controlled by the soft robotics toolkit and interfaced to Unity.
Why it matters: VR controller haptics are generally limited to eccentric rotary motors. Although they provide a dynamic and expressive vocabulary of feedback, they are unable to give a sense of weight, volume or gravity. Using an inflatable bladder, we created a form of haptics that could associate a physical normal force to a virtual object or to a hand gesture.
Contributions: Ideation and problem definition, concepting, physical hardware prototyping, testing, patent applications.
Team: Eric Faggin, Sarthak Ghosh, Alexa Siu (intern).
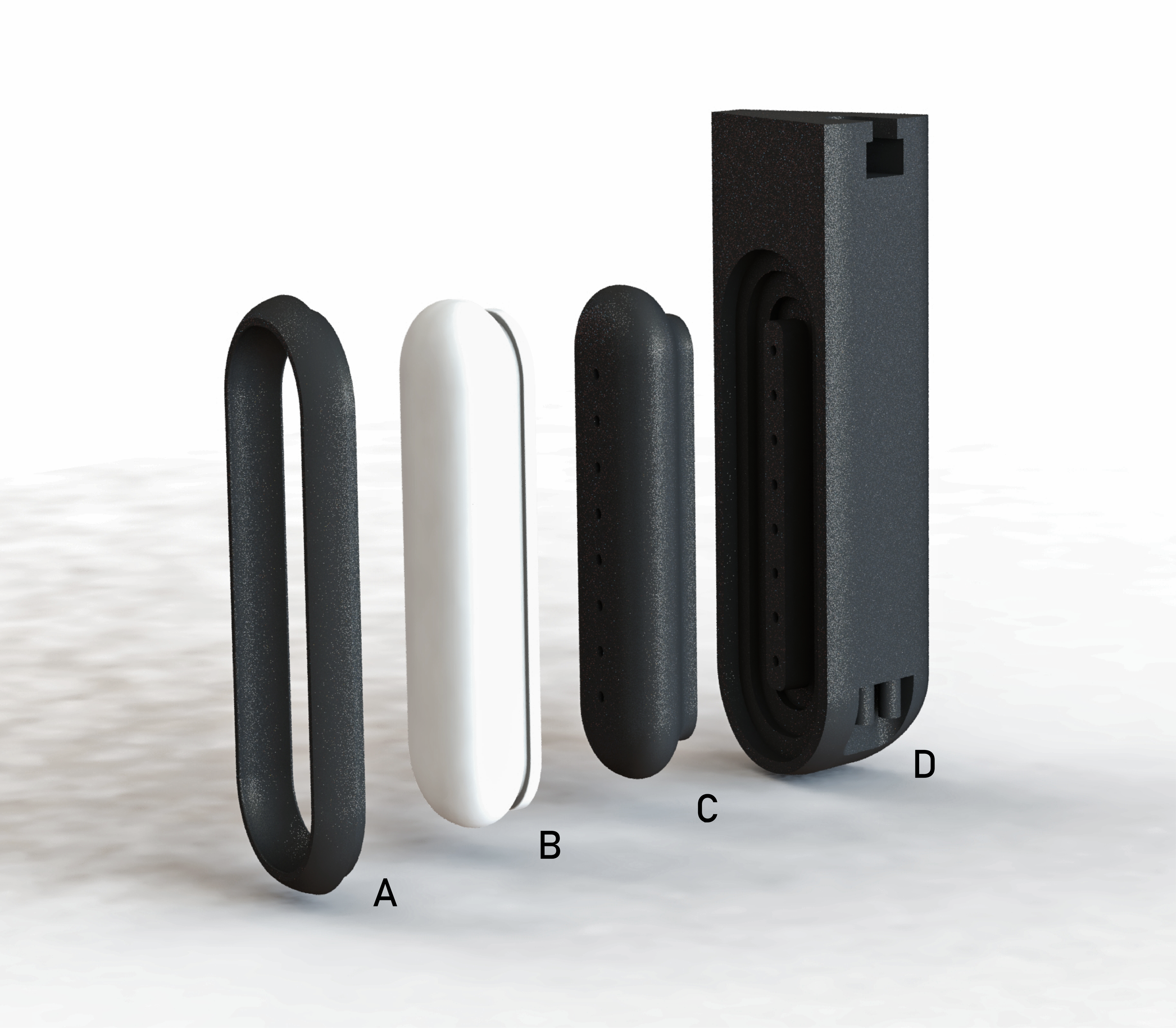
Exploded view rendering of one side of the inflatable chambers. A. The ring fits over the silicone bladder. B. The bladder fits over a boss. C The boss serves to maintain the bladder shape air is delivered through holes to inflate the bladder. D. The handle. The entire assembly is press fit into the handle, and it has two inflatable chambers.

Side by side of the controller. On the left it is shown deflated, and on the right it is shown with the right chamber inflated.
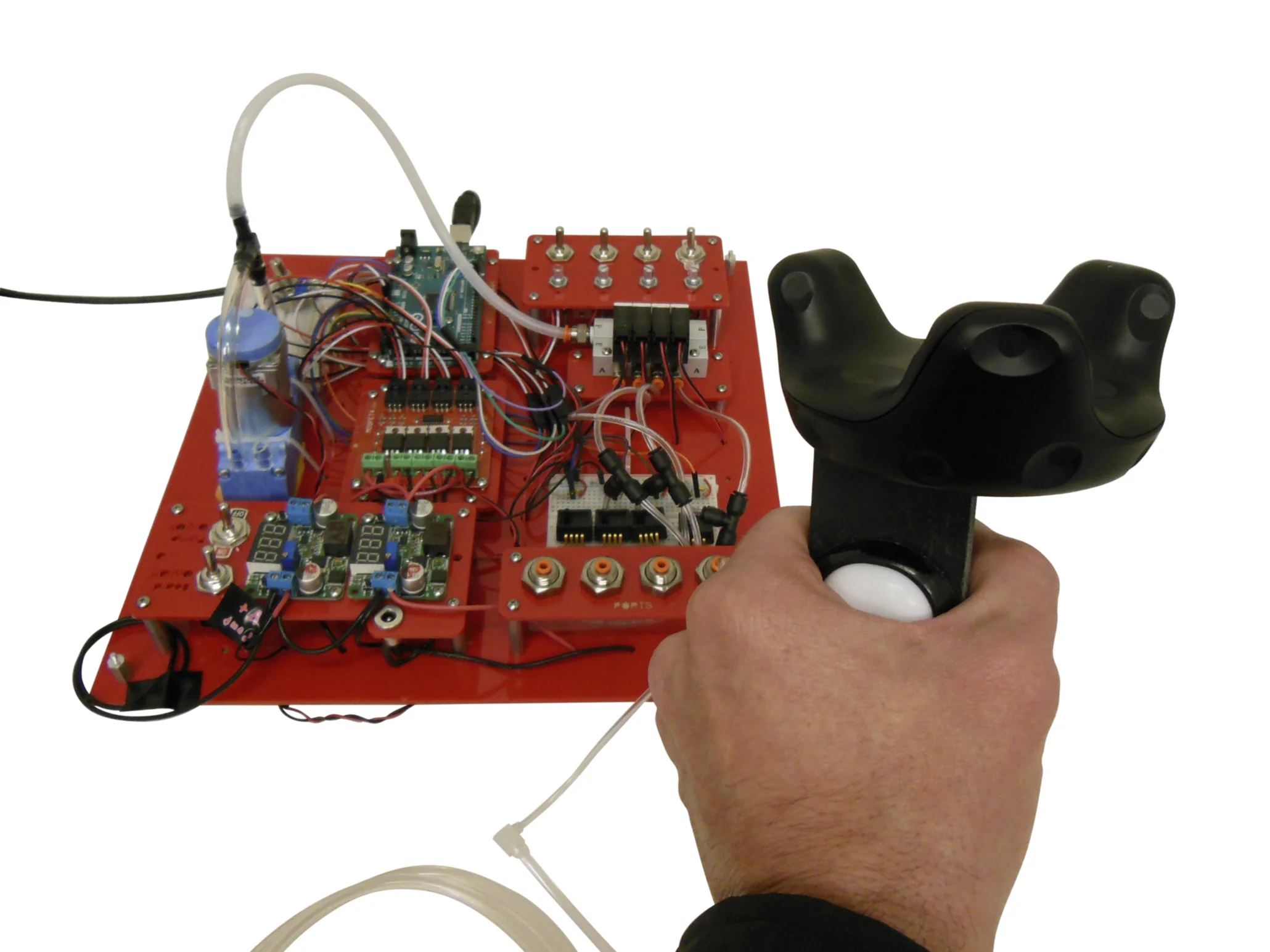
Controller shown with HTC Vive tracker and attached to soft robotics toolkit.